Salut, moi c’est Achille, j’aime beaucoup le firmware AM32 car il permet beaucoup plus de libertés dans les réglages. Malheureusement, am32 a mauvaise réputation, et c’est souvent à cause d’une mauvaise configuration, car effectivement le configurateur n’est pas parfait.
AM32, c’est le firmware open source de référence pour les contrôleurs de moteur brushless (ESC) en 32 bits, utilisé sur les robots, les drones, et les voitures.

J’adore les petits drones, mais AM32 est bien plus difficile à configurer sur ce genre de machines.
Avec les drones classiques 5 pouces en 6S, la configuration d’AM32 est très simple : il suffit de laisser les paramètres par défaut.
Ce guide est donc orienté drones plus inhabituels, qui ont réellement besoin des réglages spécifiques qu’AM32 nous propose.
1. Le configurateur
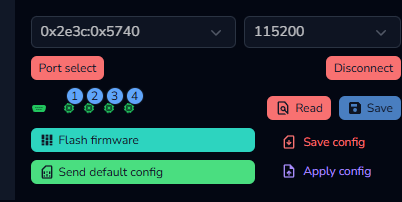
Am32 est configurable via l’outil en ligne am32.ca, incompatible avec Firefox. Pour connecter ton drone tu va devoir le brancher en usb avec la batterie branchée, et cliquer sur « read »
1.1 Flasher tes ESC
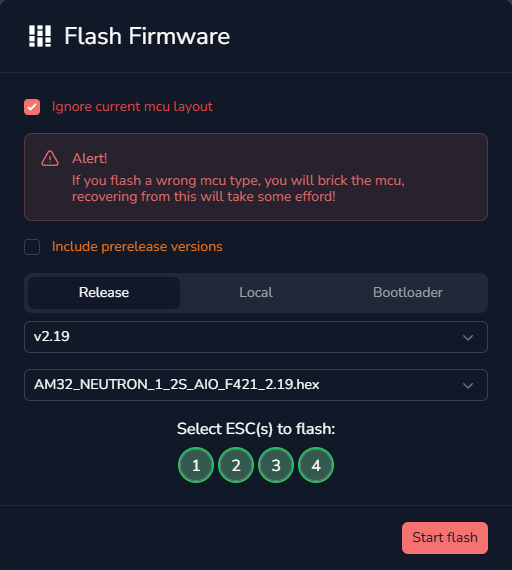
Je recommande vivement de flasher les ESC, car am32 a beaucoup évolué ces dernières années.
Au moment où je fais ce guide la dernière version est la 2.19.
Cliquez sur « Flash Firmware », puis sélectionne les 4 ESC, la dernière version, et la cible.
Il faudra parfois cocher « ignore current mcu layout » car les constructeurs flashent d’usine une version très vieille du firmware
2. Les réglages moteur
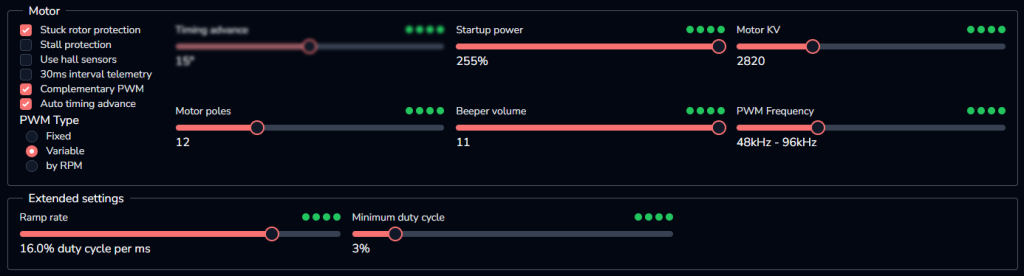
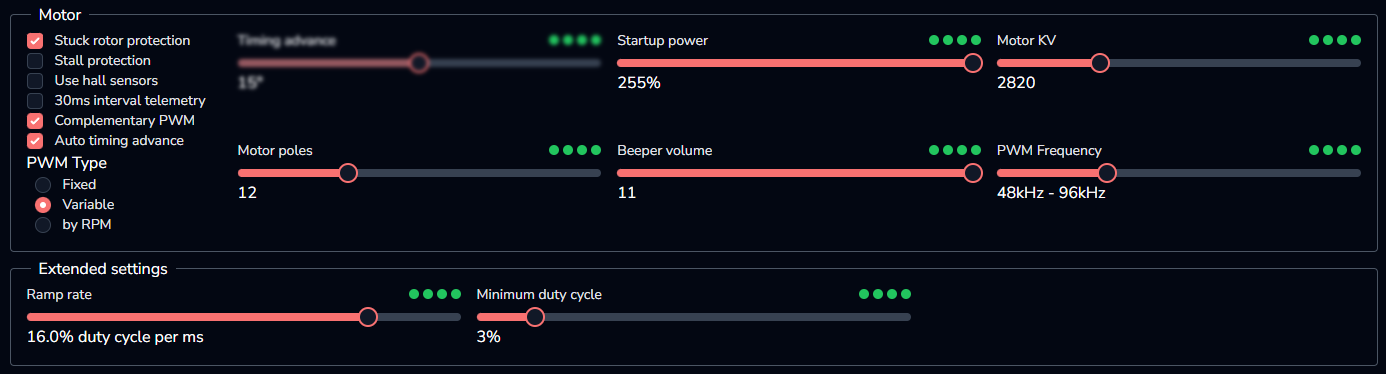
2.1 Les sliders
Je vais détailler l’influence des sliders et la bonne façon de les utiliser
– Timing advance : alimenter les bobines en avance pour qu’elles soient aimantées au bon moment
Un moteur brushless utilise des bobines pour tourner, les bobines s’allument une par une pour avoir un mouvement de rotation. Le timing advance défini le décalage en degrés entre le moment ou les bobines s’allument, et le moment ou le champs magnétique est formé. Généralement on utilise l’option « auto timing advance » ou on le règle a 22 voir 15 degrés.
– Startup power : la puissance à utiliser pour démarrer les moteurs
Le plus difficile pour les moteurs brushless, c’est le démarrage, en effet, il n’y a aucun moyen de connaitre la position d’un moteur immobile. On va donc le forcer a bouger a l’aveugle. Ce slider défini donc quelle puissance utiliser, en general plus le kv est faible, et plus les escs sont puissantes, plus on augmente cette valeur. Par exemple, un moteur 8500kv en 2s, c’est un kv faible, et j’ai des esc 20a sur mon AIO, j’ai donc mis cette valeur au max sans hésiter. Le slider « minimum duty cycle a lui aussi un impact important sur le démarrage.
– Minimum duty cycle : la puissance minimum du moteur à bas régime
On peut forcer une meilleure alimentation des moteurs à bas régime pour améliorer le démarrage des moteurs, en effet, une fois la première impulsion par le startup power, c’est le minimum duty cycle qui fait le reste attention cependant a ne pas abuser de ce paramètre car il augmente drastiquement la consommation des moteurs, je recommande de ne pas dépasser les 3%, même sur tes plus petits builds
dans mon cas, mes moteur 1103 8500kv en 2s avaient du mal a démarrer avec 0.5% (valeur par défaut)
– Motor KV : la puissance du moteur à bas régime, ne pas mettre le kv des moteurs, Motor KV = KV reel / (6/nombre de cellules)
On augmente l’alimentation des moteurs à bas régime pour améliorer le couple à bas régime, et par extension, la réactivitée et le propwash. La valeur de ce slider est un « KV » cependant, elle varie avec la tension de la lipo. Pour calculer le kv a mettre dans le slider utilise cette équation :
Motor KV = KV reel / (6/nombre de cellules)
Pour mes moteurs 8500kv en 2s, j’ai fait 8500 / (6/2) = 2820 KV
tu peux aussi mettre une valeur arbitraire, moins de kv = plus de couple a bas régime, mais plus de conso. C’est donc interressant de diminuer le kv si tu a mis des hélices grande par rapport a la taille du rotor. Par exemple 1404 en 3.5″, tu met un kv plus faible que celui de la formule.
– Motor poles : le nombre d’aimants sur la cloche du moteur
généralement 12 pour les moteurs de 1404 ou moins, et 14 au dessus
– Beeper volume: ne pas mettre à fond sans réflechir
Si tu met le beeper volume a fond, tu risque de remarquer un double démarrage des escs, voir l’impossibilité de démarrer correctement. En effet, les moteurs consomment beaucoup pour beeper fort, et a des fréquences étranges, que les régulateurs de tension ont du mal a supporter.
– PWM Frequency: mettre 24-48 pour un gros drone, et 48-96 pour un plus petit.
C’est la fréquence de commutation des escs, la mettre trop haute va réduire le couple et la vitesse max des moteurs, et peu causer des desyncs la mettre trop basse augmente la consommation, et diminue la précision.
2.2 Les cases a cocher
les options déconseillées pour les drones sont en italique
- Stuck rotor protection : Lorsque tu arme, si au bout de 3s le moteur n’a pas réussi à démarrer, il va abandonner
- Stall protection : Prévu pour les voitures RC, lorsqu’il force, am32 pousse le moteur un peu plus loin pour l’empêcher de s’arrêter
- Use hall sensors : Prévu pour les articulations, utilise un capteur pour connaitre la position du moteur
- 30ms interval telemetry : utilise un fil en plus pour la télémétrie, rarement utilisé pour les drones
- Complementary PWM : C’est une sorte de frein moteur pour les ESC, ça permet de freiner le moteur sans consommer de courant, en court-circuitant les phases. C’est conseillé pour les drones FPV et essentiel pour la réactivité
- Auto timing advance : Am32 peut choisir lui même le timing le plus intéressant pour tes moteurs, coche cette option et tu n’auras pas à t’embêter à régler le slider « timing advance »
- PWM Type : en 32 bits, les ESC peuvent varier le PWM en fonction de la vitesse du moteur, et/ou des performances des composants de l’ESC. Je te conseille l’option « Variable » car le PWM sera choisi automatiquement en fonction des 2 facteurs précédents.
3. Les autres réglages
Je conseille de les laisser par défaut, ils concernent surtout les véhicules RC, les avions et n’ont aucune importance pour les pilotes de quads FPV.

4. Des exemples
Demande moi sur discord ou par mail pour que j’ajoute tes réglages, si tu as un build original en terme de moteurs et ESC, pour que les autres pilotes puissent s’en inspirer.
4.1 Un 2.5p 2s type « kayoumini »

Résumé du build : Batteries 2s, moteurs 8500kv, aio Ysido am32 20a, c’est celui que j’ai utilisé pour ce guide. En effet, sans toucher au réglage d’am32, je ne pouvais même pas armer.